








Posiplus
- Manipulators with Cable






Features
- Max weight capacity: 200 kg
- Max working radius: 4500 mm
- Vertical lift: 1900 mm
- Working pressure: 0.7 ÷ 0.8 Mpa
- Control system: solely pneumatic
- Supply: filtrated compressed-air (40 µm), not lubricated
- Noise level: <70 dB
- Max vertical lifting speed: 0,5 meters/second
- Working temperature: from +0° to +45° C
- Consumption: from 40 Nl ÷ 120 Nl per working cycle
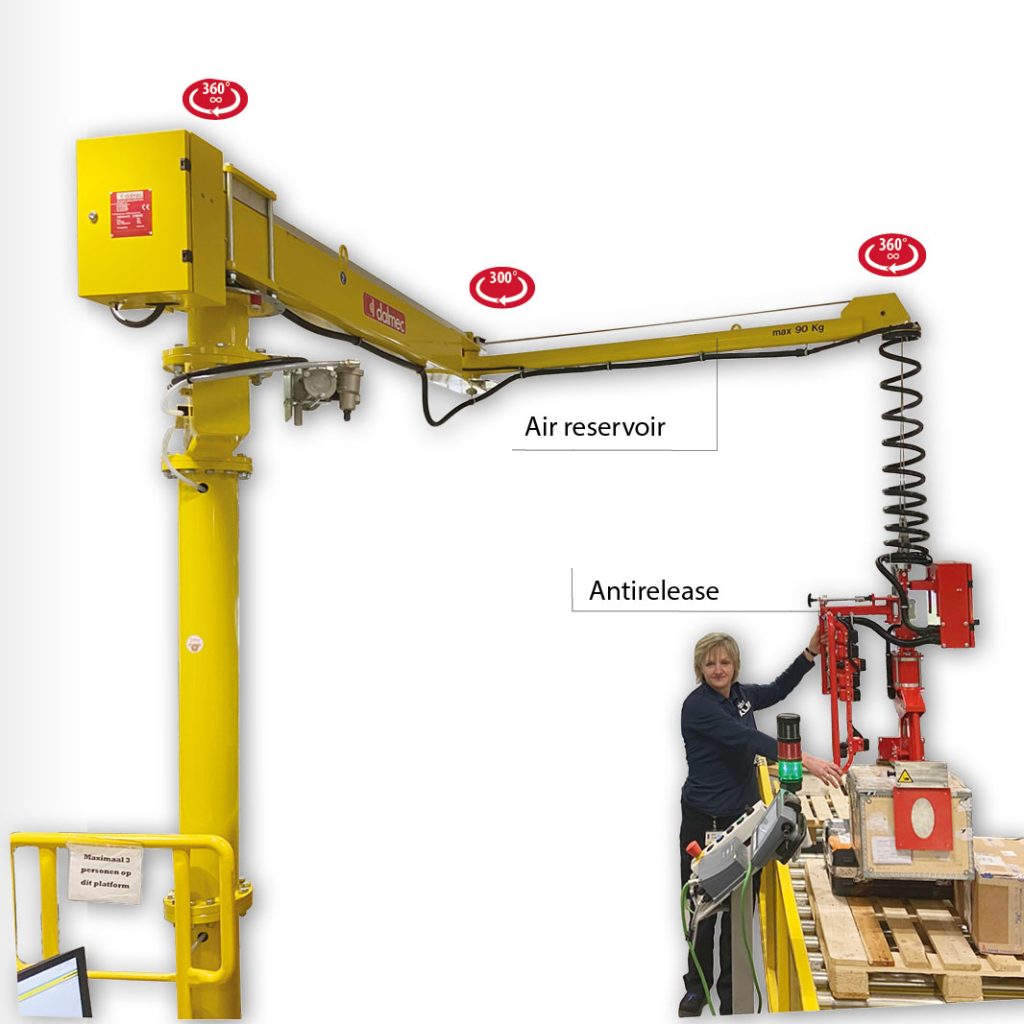
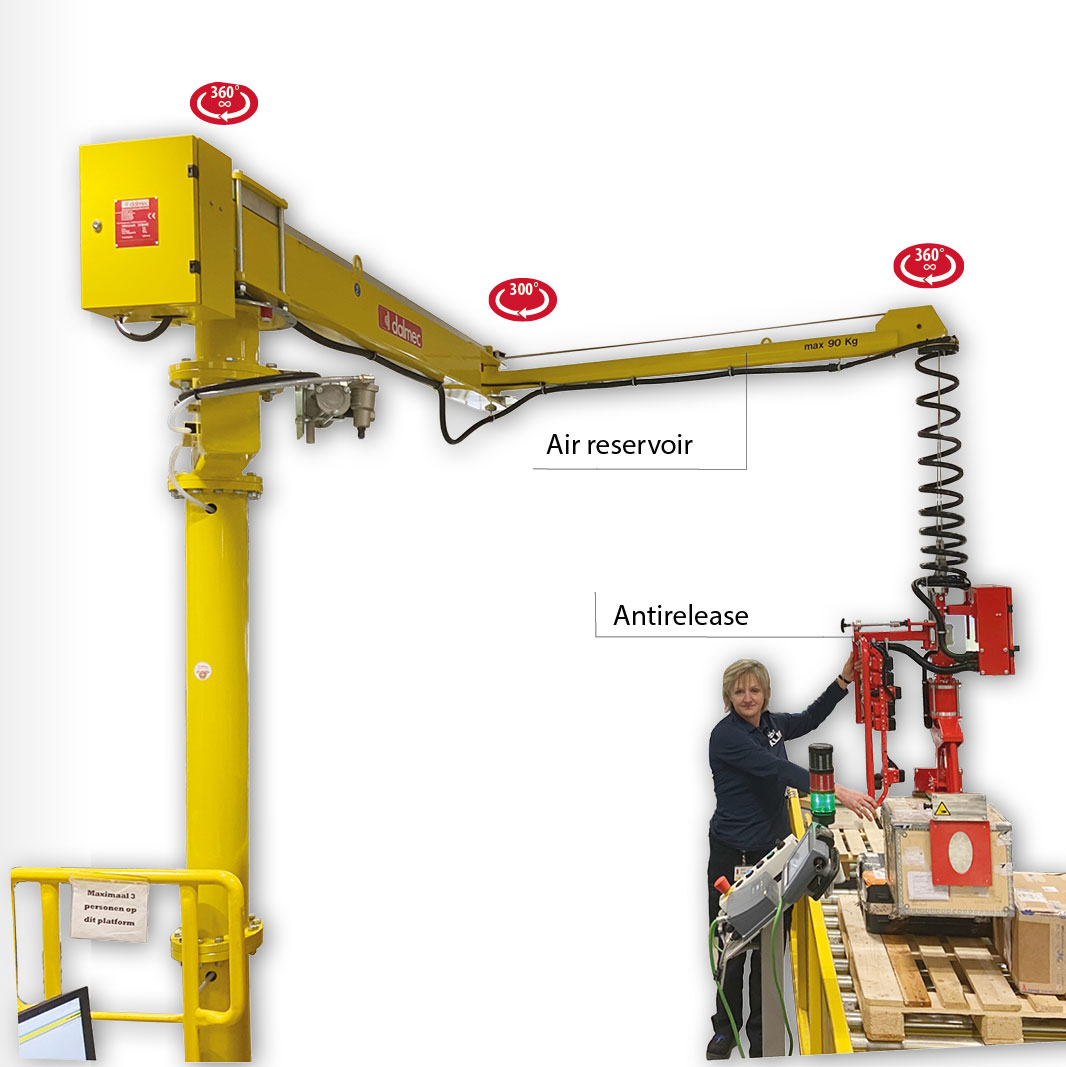
- Rotations: – constant 360° on the column and tooling axis - 315° on the intermediate axis
Execution
- Atex Column
- Atex Fixed Overhead
- Atex Overhead Running
- Column
- Fixed Overhead
- Inox Column
- Inox Fixed Overhead
- Inox Overhead Running
- Overhead Running
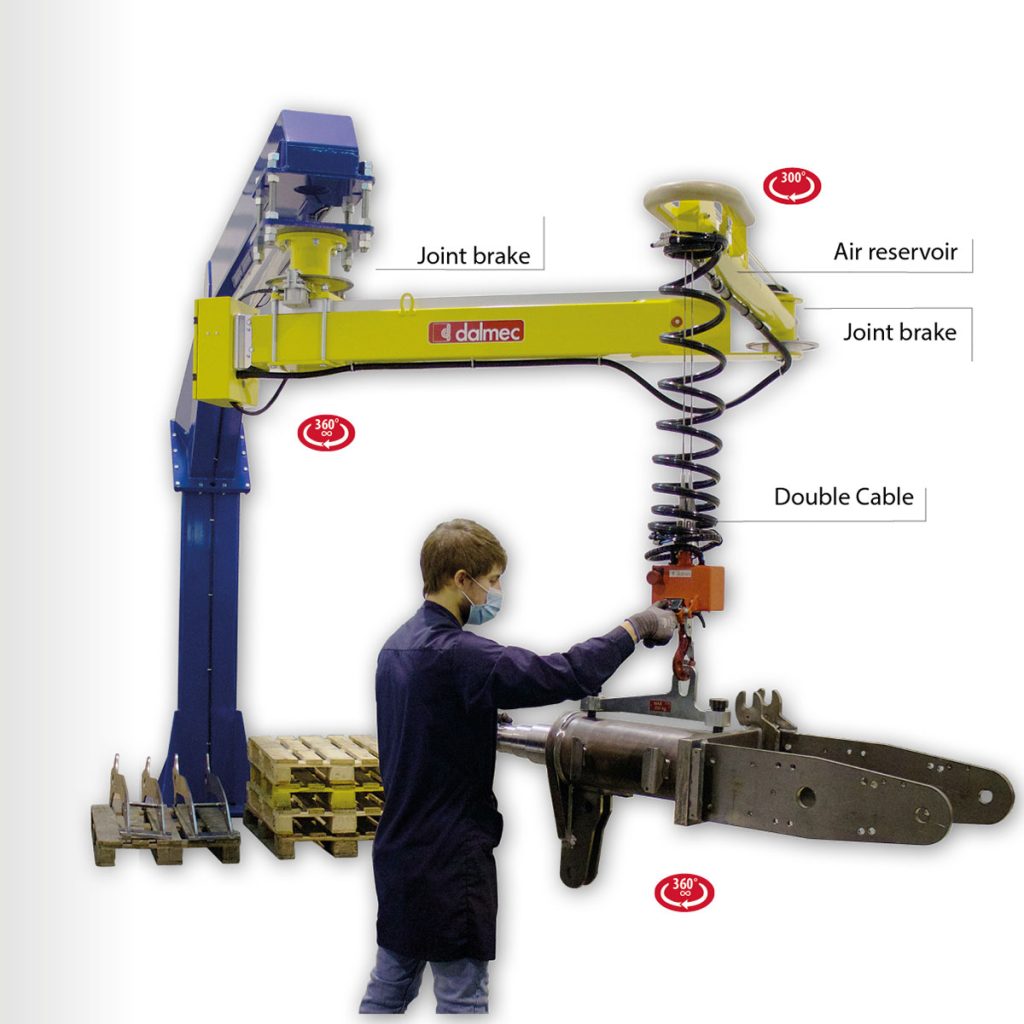
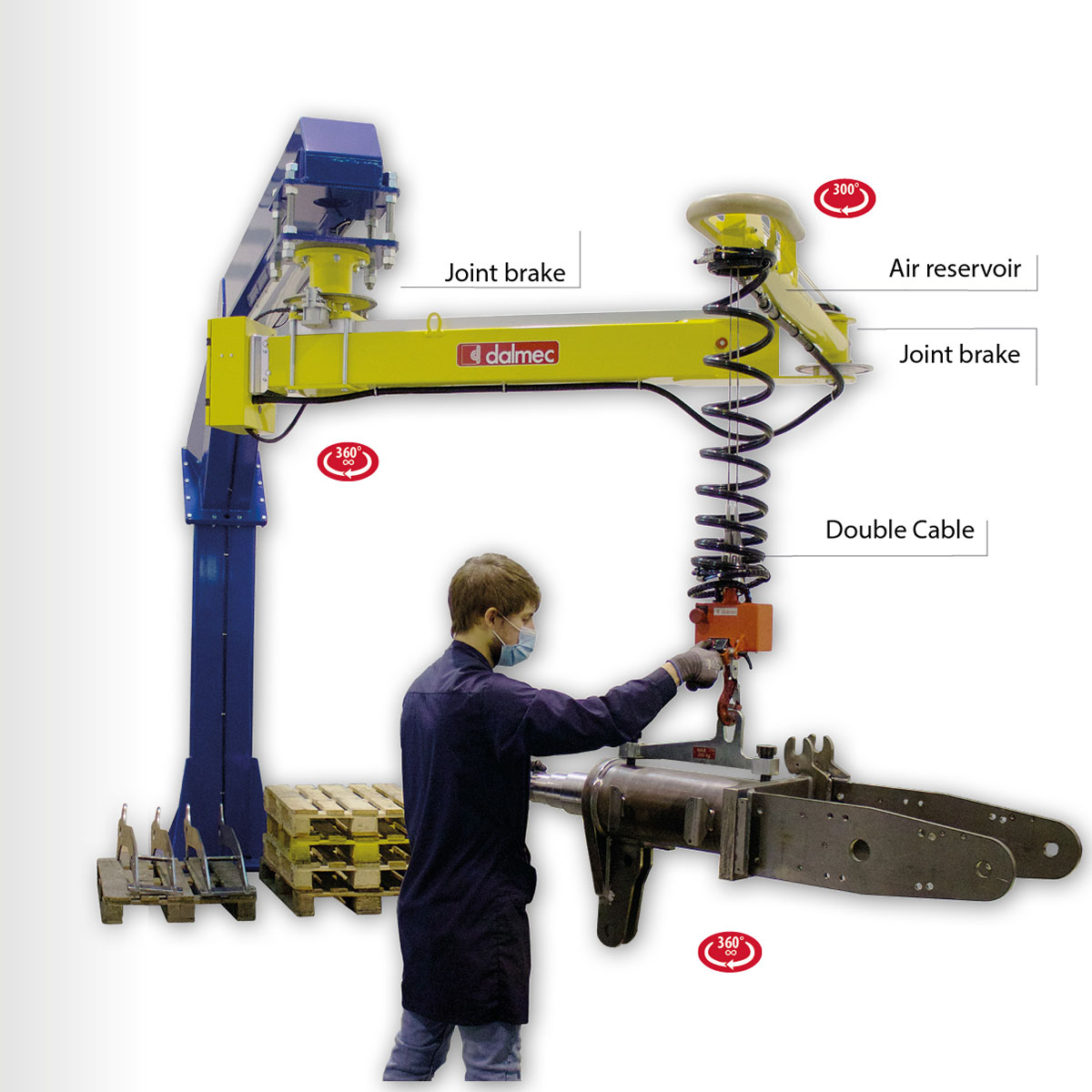
PNEUMATIC MANIPULATOR POSIPLUS PP WITH DOUBLE CABLE
POSIPLUS PP与影响以及双电缆操纵者h load capacities, capable of handling loads up to 200 kg and reaching working radii up to 4500 mm. The gripping tooling is connected to the balancing group through two independent steel cables to ensure maximum safety. The particular double-arm structure with intermediate joint makes it easy to operate within the entire working area. Specific brakes mounted on the main joints guarantee control of drift movements.
OPERATION
A pneumatic cylinder fed with compressed-air, combined with a transmission cables system provides balance to the load weight applied.
The cylinder force is controlled through two pneumatic circuits purposely arranged: the first one always keeps the weight system balanced; the second one provides to always keep the weight load balanced.
The operator can change the load level applying a minimum force on the gripping tool or directly on the load.




| Fixed plate for floor anchoring | Autostable base-plate for forklift truck | Autostable base-plate for pallet truck |
 |
 |
 |
| Manual autostable base-plate | Trolley mounted base-plate | Floor built-in track |
 |
 |
 |

Anchor flange
The pneumatic manipulator fixed overhead version allows to eliminate any floor obstructions.
The flange of the Manipulator is supplied with holes for the anchoring with screws to a strong plate to the ceiling or to a shelf.
All movements are free and are obtained with minimum effort by the direct action of the operator on the gripping tooling or on the load.

Anchor
The Manipulator is supplied with an overhead trolley to run in a tracking system.
Tracking system
The tracking system is composed of two opposite aluminium U sections with connecting and stiffening ribs,complete with attachment points for an overhead suspension and end buffers. The junction between the various parts is done with screws.
Attachment
The attachment of the tracking system to the supporting structure is carried out by means of rods and suspension brackets