









posifil
- Manipuladores con电缆




características
- 电容Máx。140公斤
- 玛克电台。De Trabajo:3000毫米
- Carrera垂直:1800毫米
- PresiónDeTrabajo 0.7÷0.8 MPa
- Sistema de Control:únicamenteNeumático
- Alimentación:aire comprimido filtrado(40 µm),无卢布里卡多
- Nivel de Ruido:<70 dB
- VelocidadMáx。deleverción垂直:0,5 Metros / segundo
- de +0°A +45°C
- 消费:de 20 nl÷100 nl por ciclo de trabaj
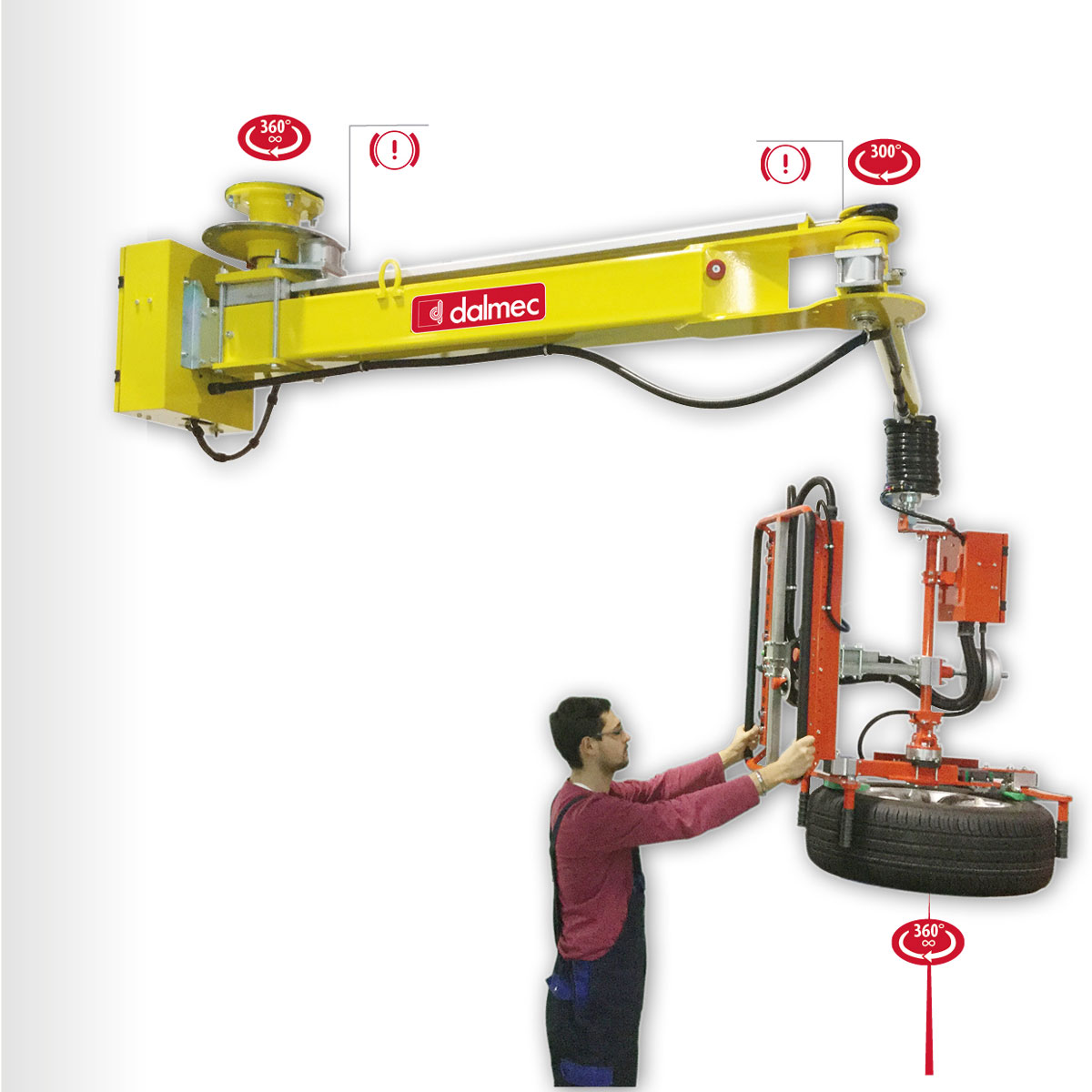
- rotaciónes: - constante de 360°del eje columna yejeútil - 315°del eje Intermedio
Ejecución
- Atex Columna
- Atex suppendido cordero
- Atex sustendido fijo
- 科鲁姆纳
- 修复了开销
- Inox columna
- Inox Suspendido Cordero
- Inox Sustendido Fijo
- Sustendido Cordero
- Sustendido fijo
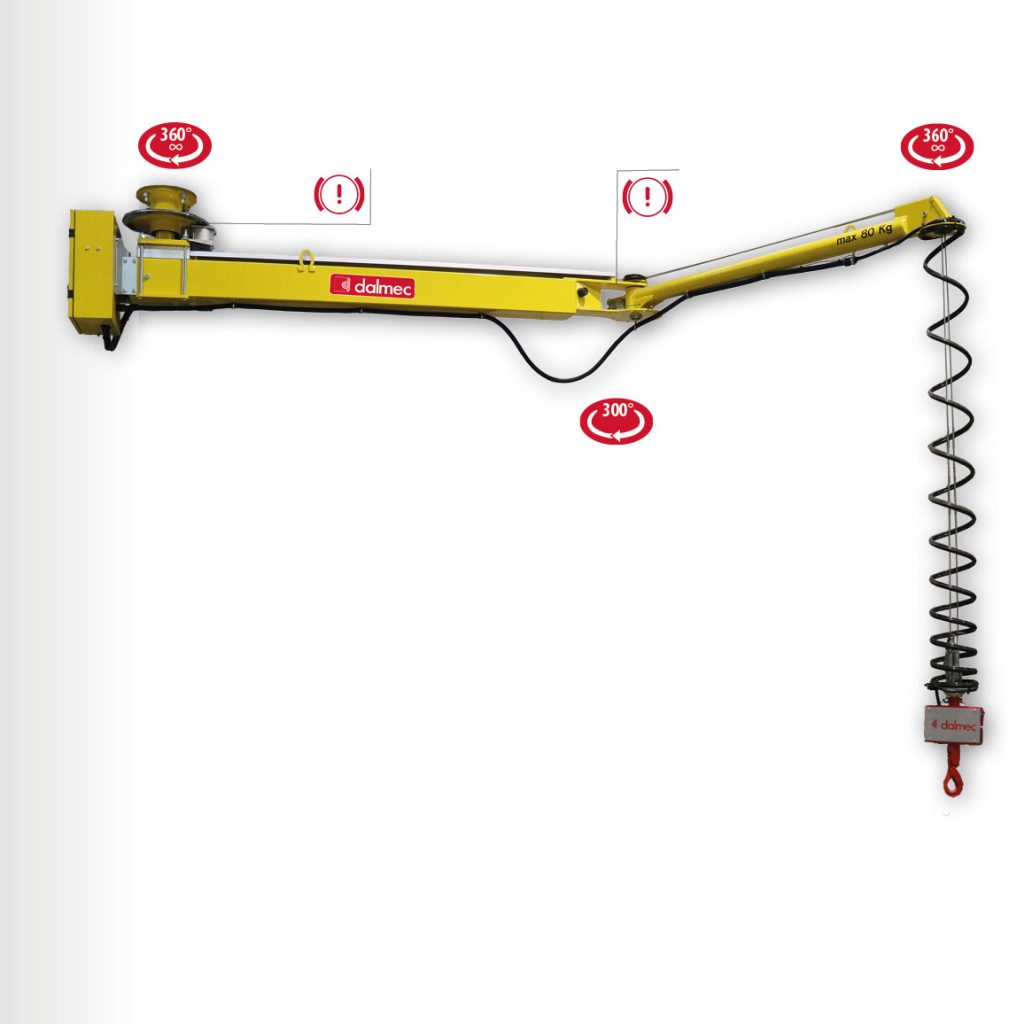
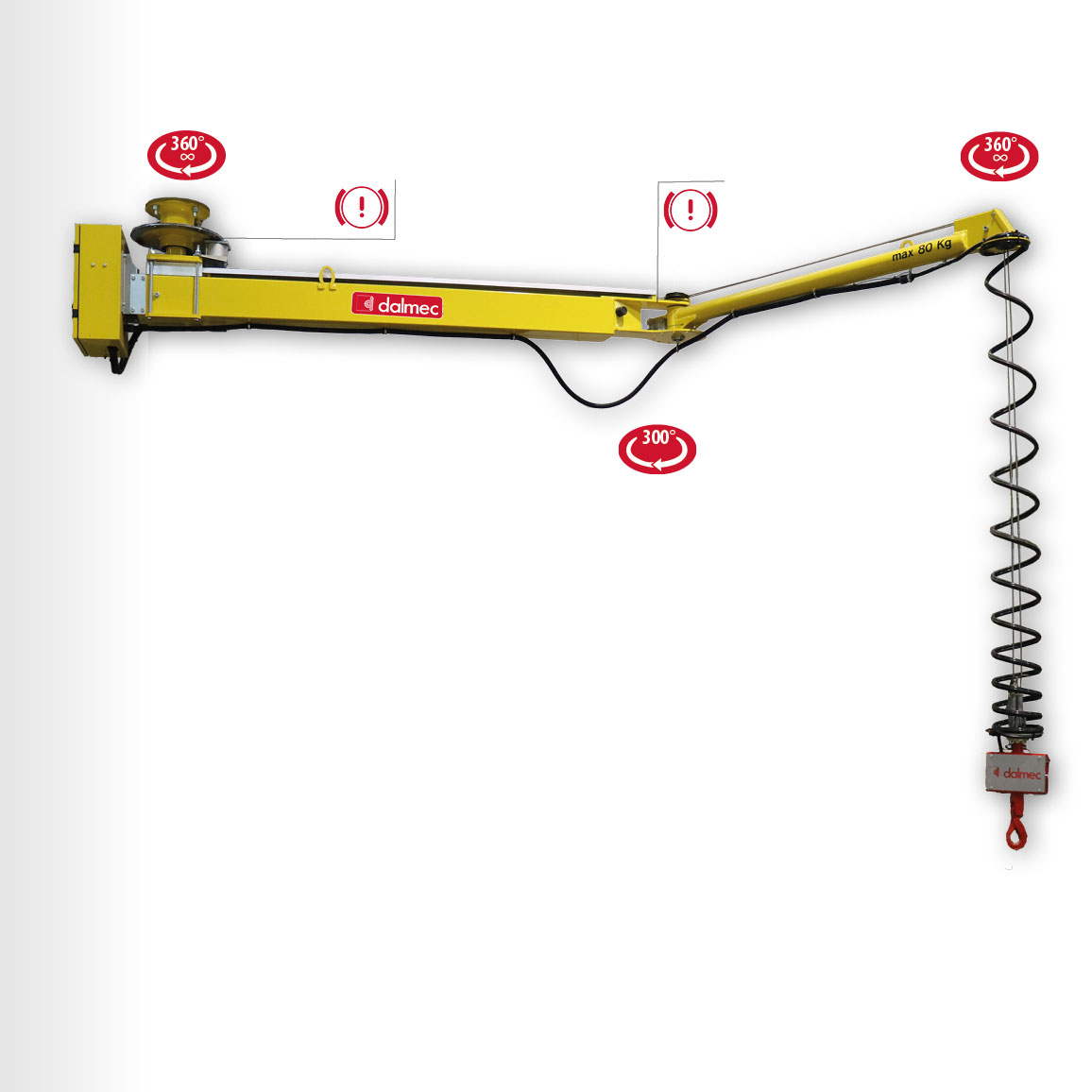
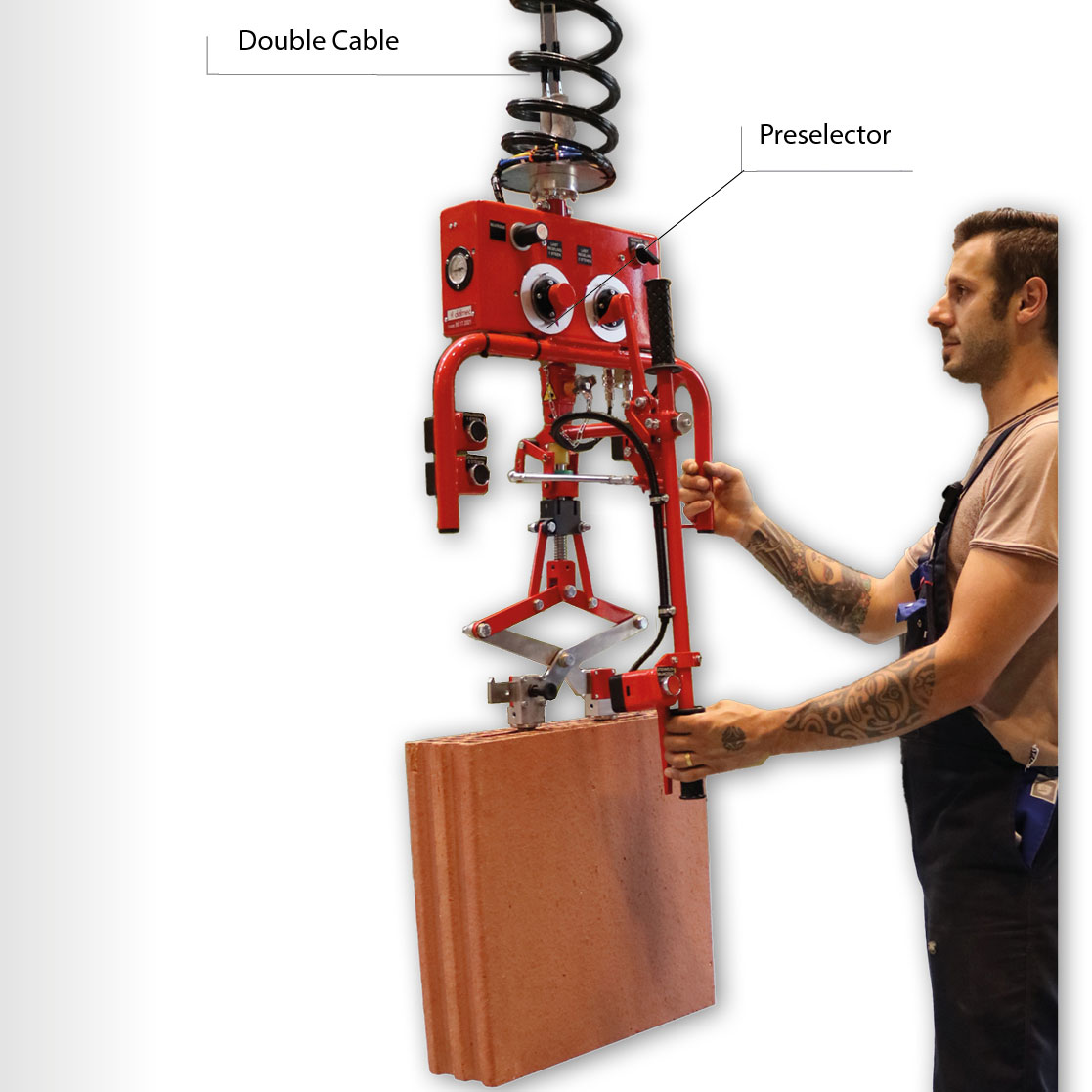
manipulador con电缆posifil pf
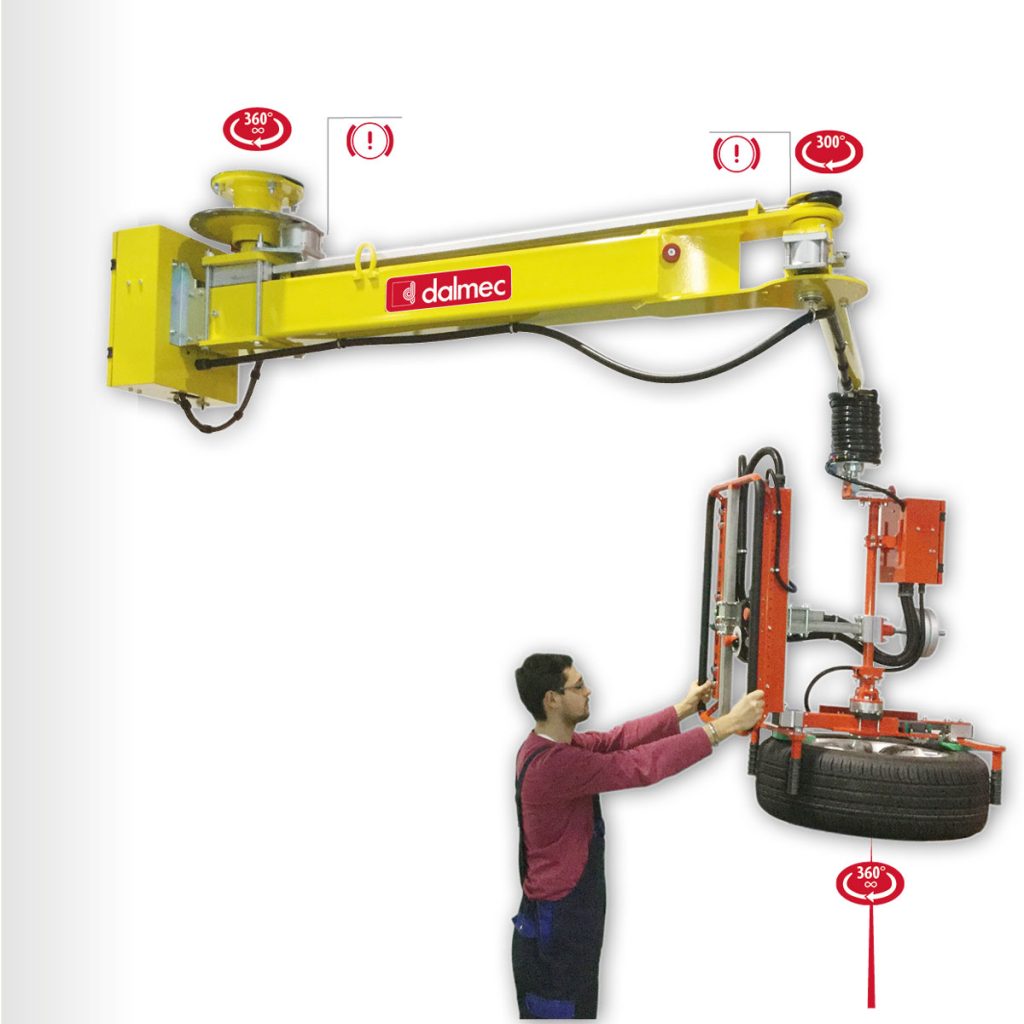
El Manipuladorneumáticocon doble电缆posifil pf,Equipado con simples emplaseos de toma允许LaManipulaciónen ausencia de peso de las de las cargas en todas en todas las direcciones del espacio。
El emellimento de tomaestáunidoal grupo de equilibrio atravésde dos dos Indeptictientes,de acero para garantizarlaMáximaseguridad。La extructura doble brazo conarticulación中间媒介lo hace manejable en toda el toda el al al trabajo。
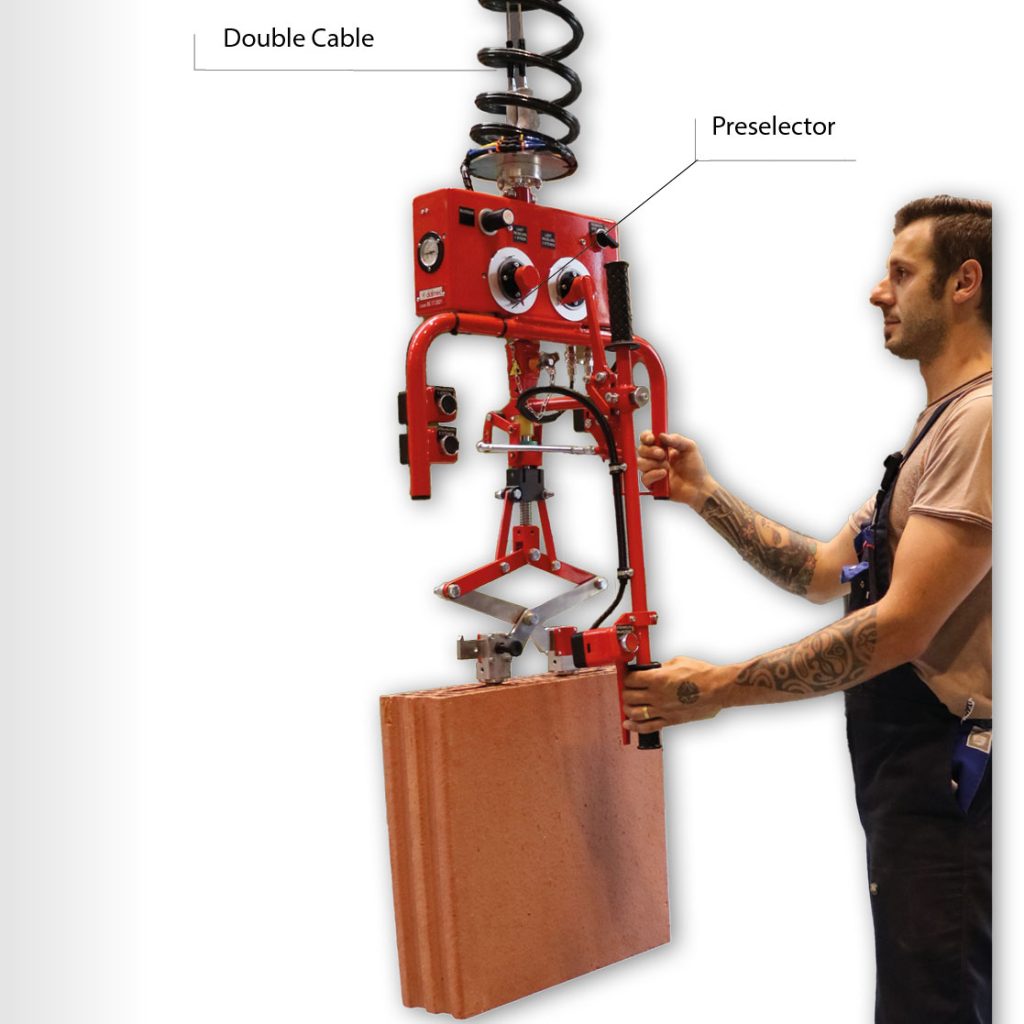
Funcionamiento
Un Cilindroneumáticoalimentado con aire comprimido,acoplado a in sistema detransmisiónde cables证明了equilibrar el peso el peso de la carga aplicado。La Fuerza del cilindro se Controla por medio de dos courtilesneumáticosdebidamente gebulados:El primero siempre equilibrado eelbibrado el peso el peso el peso el peso de toma de toma y de toma y del toma y del sistema d del sistema detransmisión;El Segundo Mantiene Siempre Equilibrado El Peso de la Carga。El cambio del nivel de carga se gertiene metiante laaplicacióndeunafuerzaMínimasobreelútilde toma o Directamente sobre la Carga。







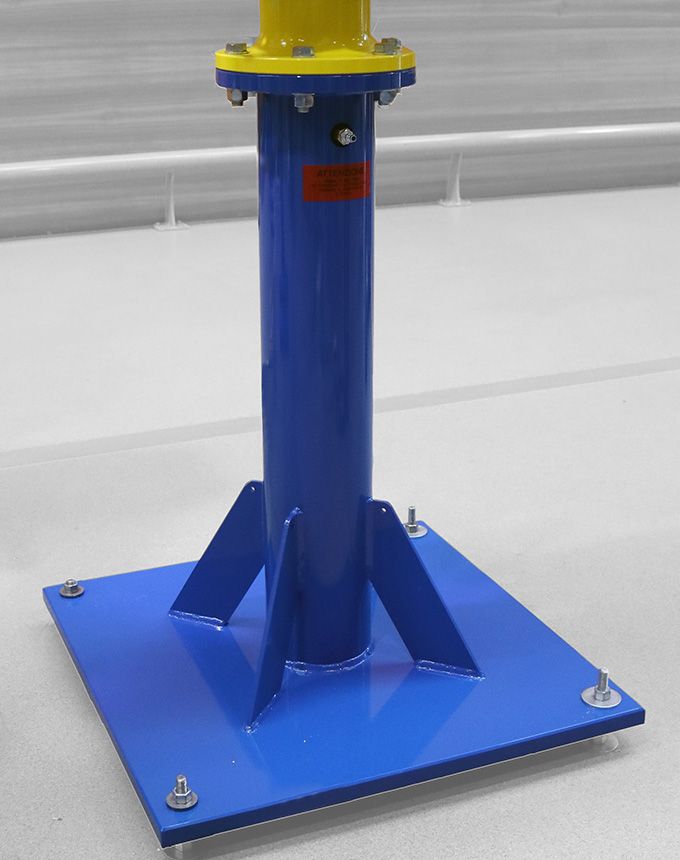
基础fija para el anclaje al suelo |
基础自动座椅carretilla leveradora |
基本自动para para transpalet |
 |
 |
 |
基础自动座椅 |
基础con ruedas pararaílesen el suelo |
铁路parainstalaciónenel piso |
 |
 |
 |

Brida de Anclaje
El Manipuladorneumáticoenejecuciónsustendida fixendida permite dejar libre todo obsofstáculodel suelo。
La Brida del Manipulador Se Realiza Con Agujeros para El Anclaje Mentiante Tornillos A Una Placa Robusta al Techo o a Estante。
Todos Los Movimientos en el Espacio son libres y se conunmínimoesfuerzo por laaccióndirecta dilleca dil dil directa del del operador sobreelútilde toma o sobre la carga。

Anclaje
El Manipulador Viene Provisto完成Carro Para el deslizamiento en el Riel。
Sistema de deslizamiento
El sistema de deslizamientoestáconstituido de unble perfil A u de aluminio contrapuesto,concimbras de enlace y de Refuerzo,pottleado por los enganches para la la lasusedensiónaéreaaéreay de los y de los to devía。Launiónentre las distinas partes se earliza con tornillos。
fijacióna la estructura desostén
Lafijacióndelasvíasde rodadura a la estructura desosténeefectúaatravésde tirantes y eclisas desudsensión。