









posivel
- 伪造者


finctionnalités
- 最大力量:60公斤
- 人造丝D'Action Max:2600毫米
- 课程垂直:1700毫米
- 压力D'LISTION:0.7÷0.8 MPA
- SystèmeDeCommande:Seul Pneumatique
- 饮食:空气compriméfiltré(40 µm),非Lubrifié
- Niveau Sonore:<70 dB
- Vitesse Max de Levage:0,5 m/秒
- Températured'lipation:de +0° +45°C
- 辅助:de 10 nl÷50 nl倒周期de travail
- 旋转: - 360°L'Infini autour de l'Ax de la ax de la colonne et de l'ew'e of depréhension - 300°de l'AxIntermédiaire
执行
- aérienfixe
- Aérien手机
- Atexaérienfixe
- Atexaérien手机
- Atex Colonne
- 科隆
- Inoxaérienfixe
- Inoxaérien手机
- Inox Colonne
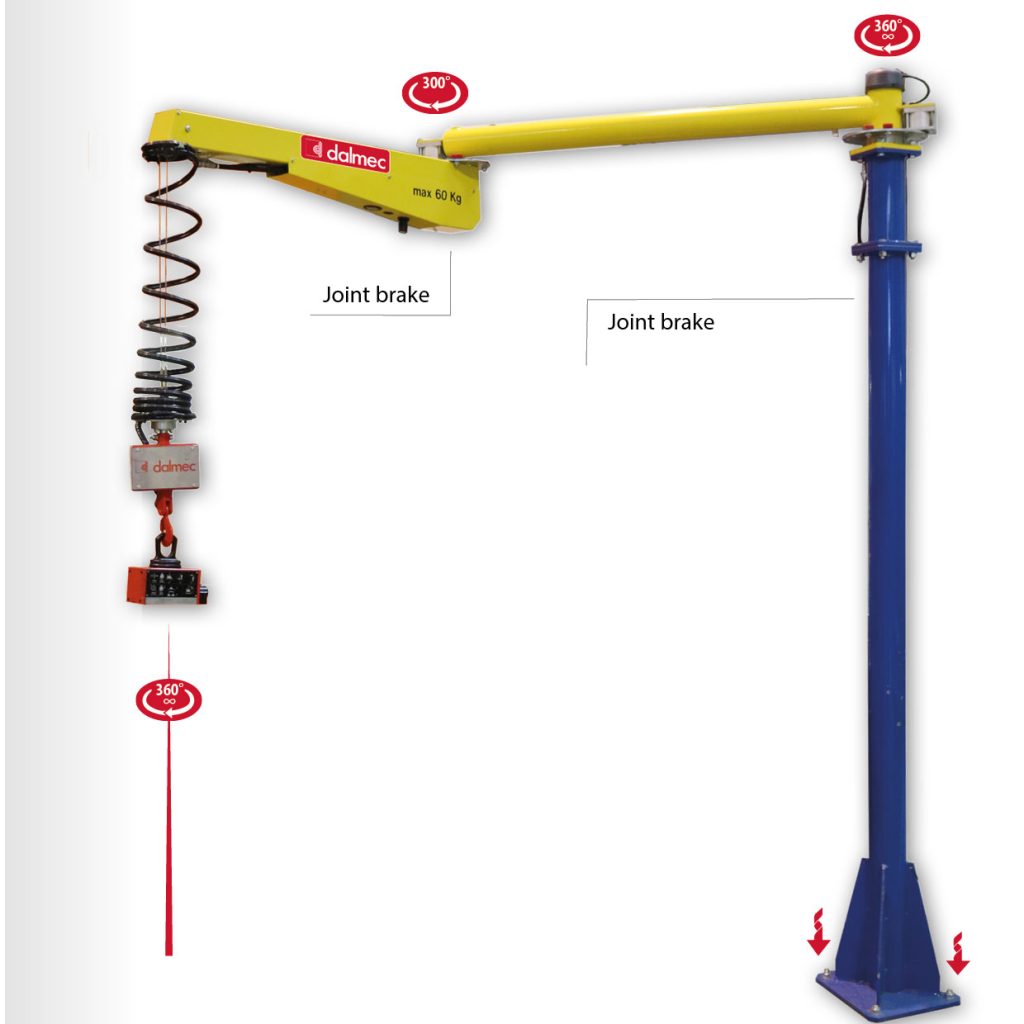
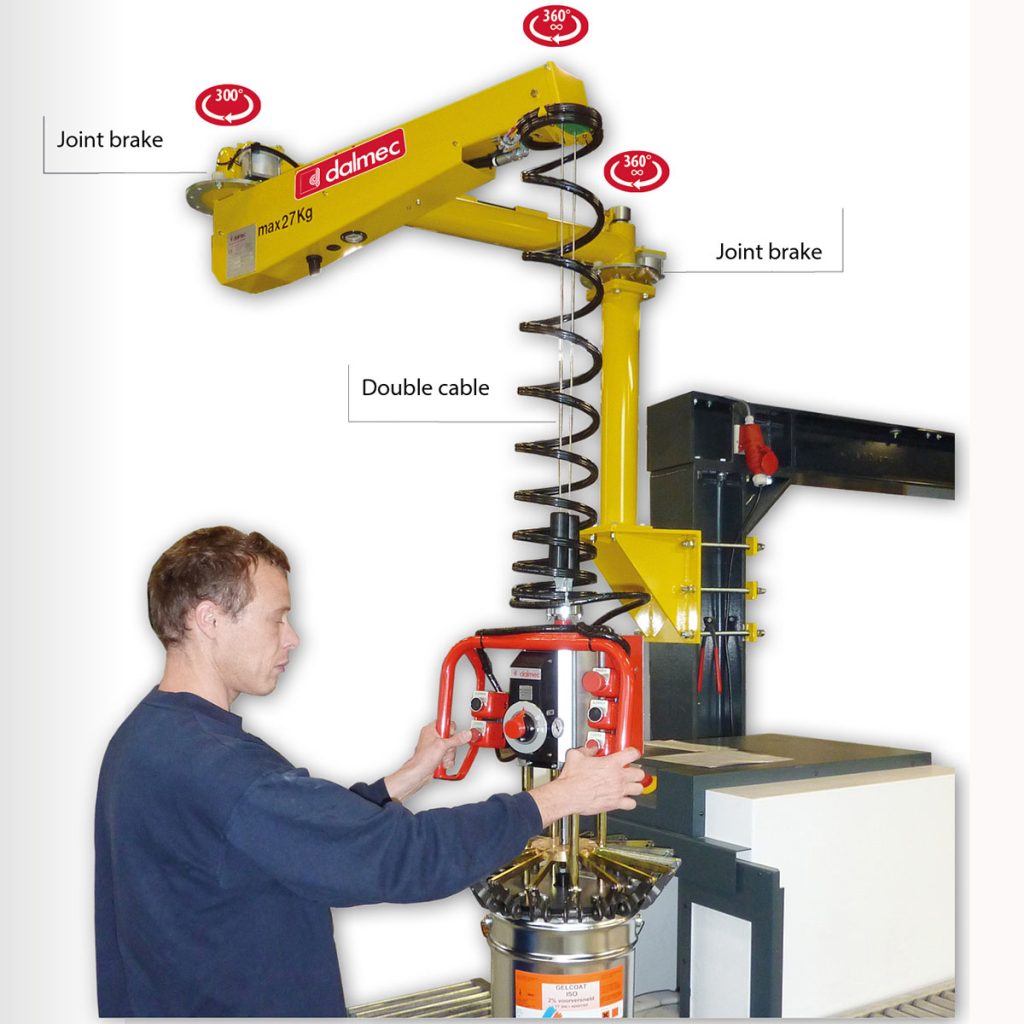
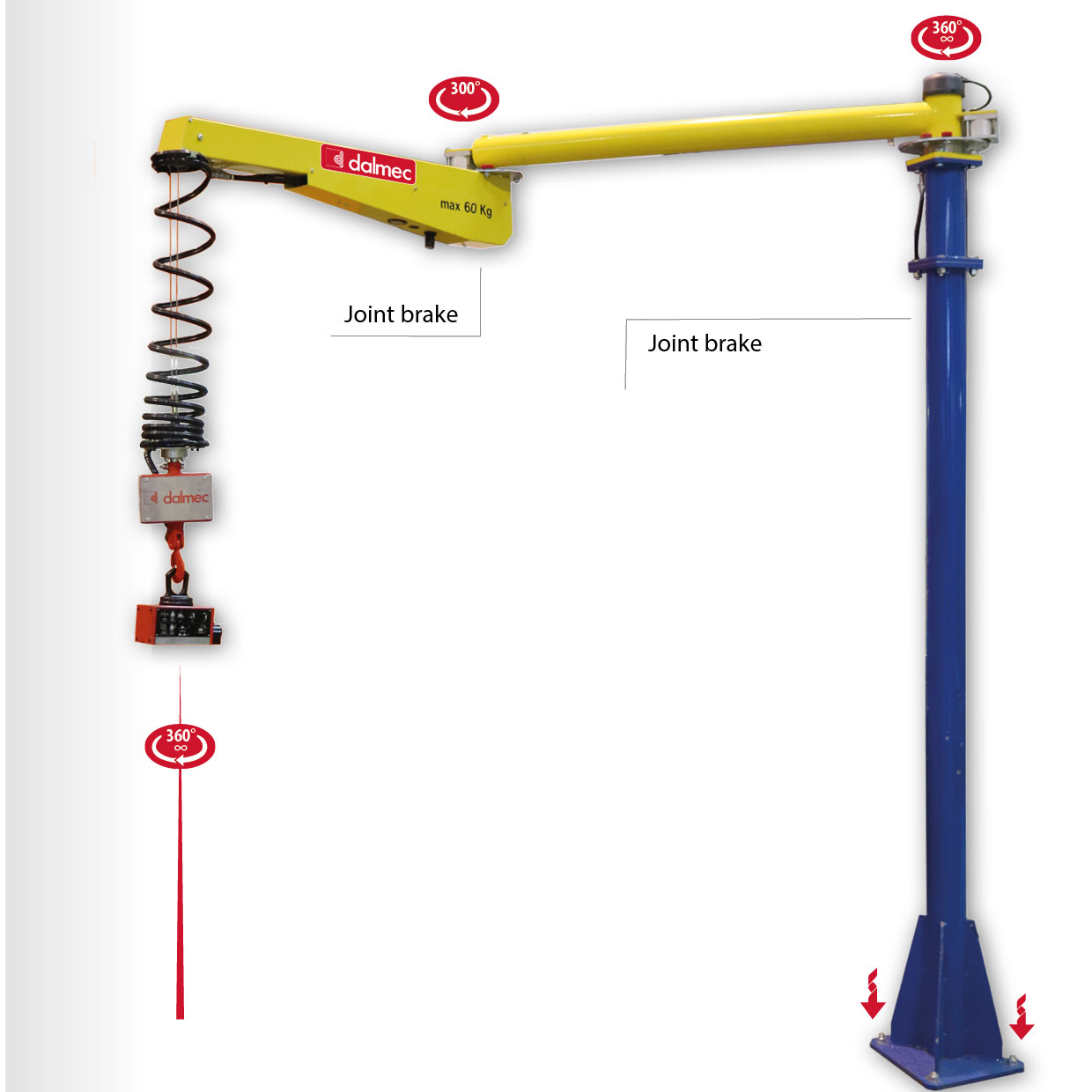
ManipulateuràCâblePosivelPV - Manutentionneur
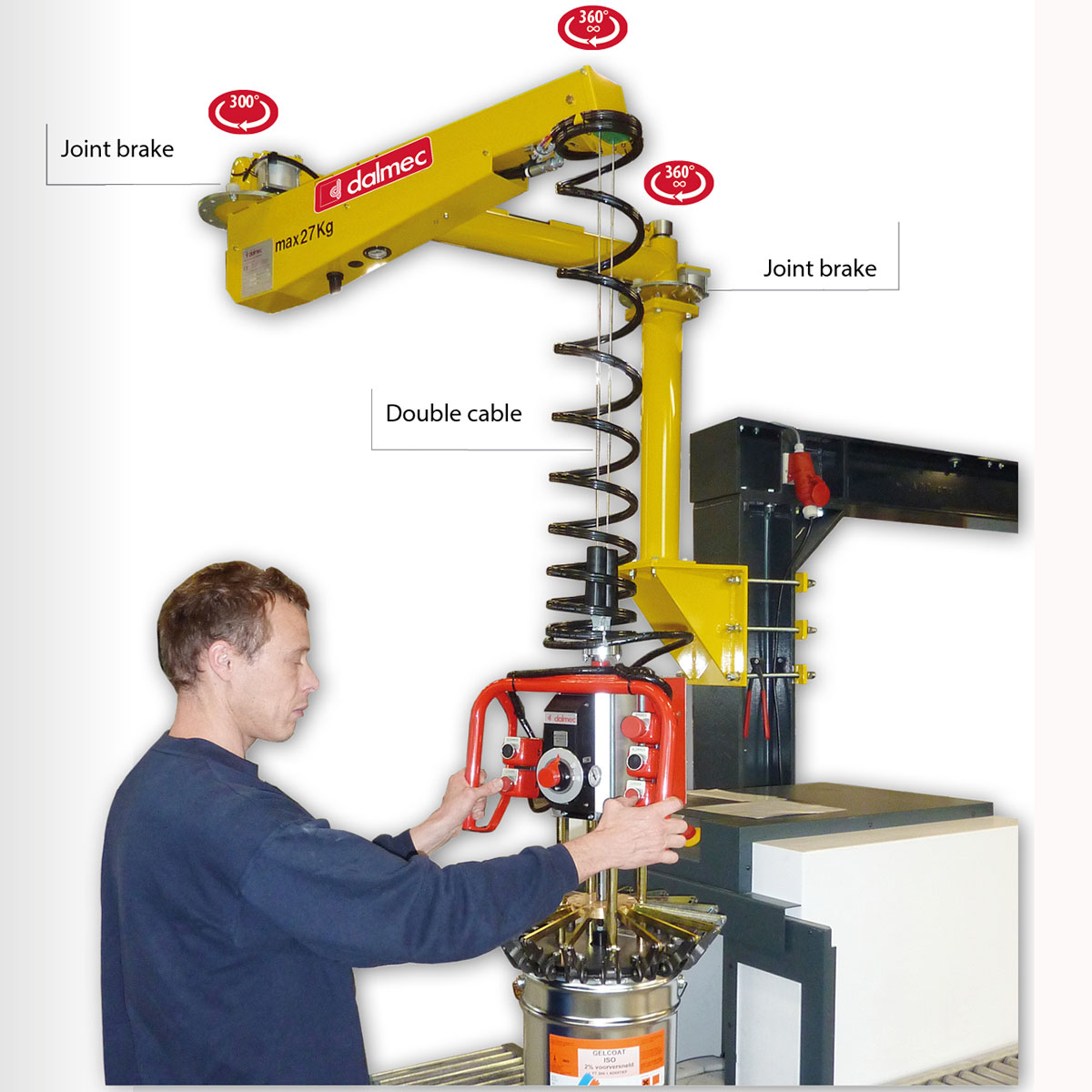
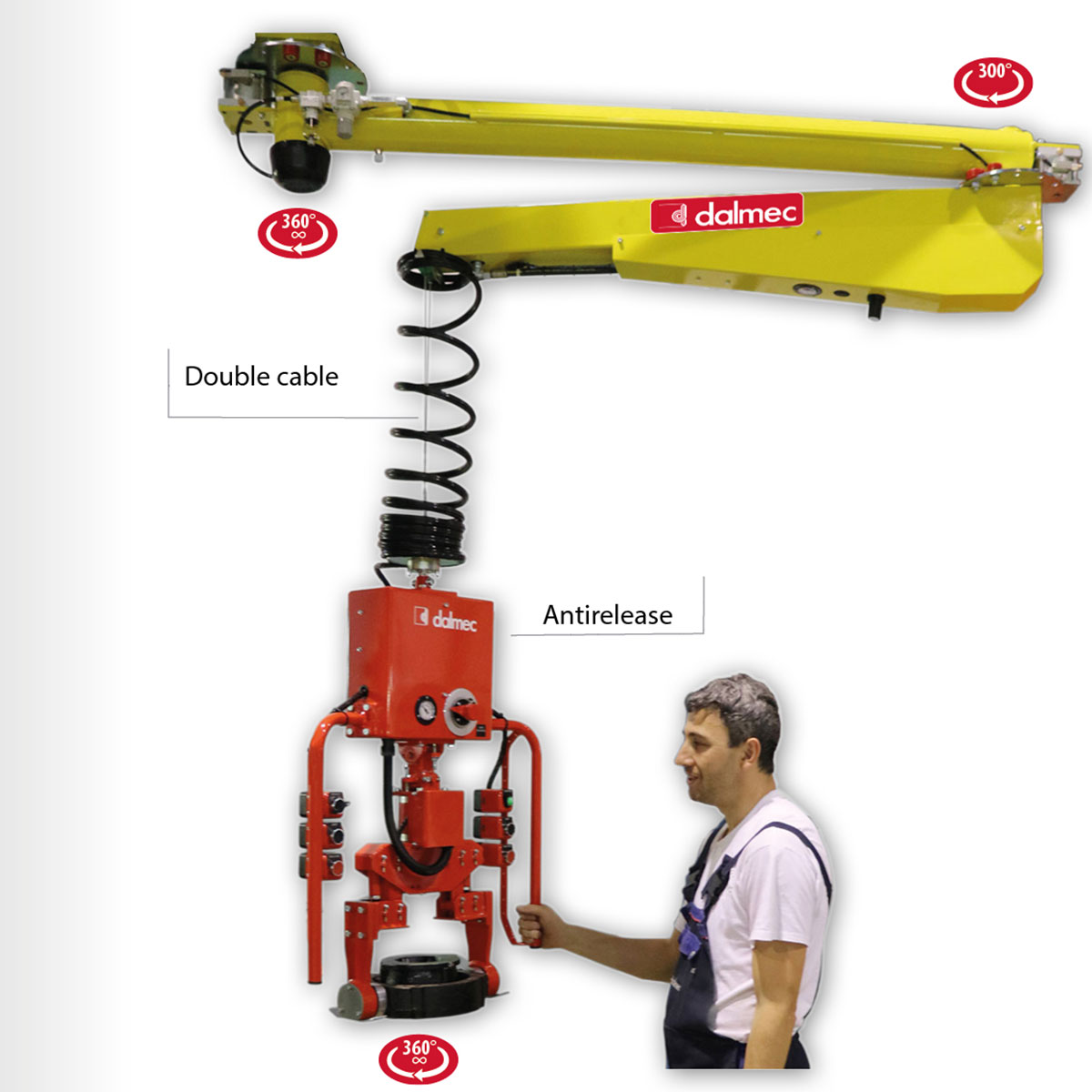
Le Manipulateur pneumatique posivel pvestimulièrementpour pour pour la manipulation manuelle,不再努力,de de offelégèresdans dans tutes toutes les les de l'Espace de l'Espace。il se distingue par une结构à双胸罩avec avec发音intermédiairece qui qui suse souplesse etprécisiondes mouvements des dans tout tout le le le le boluge de travail de Travail。Les Outils depréhensionAssociésau posivel pv sontreliésau manipulateur par deuxcâblesindépendantsin acier por garantir un garantir un desécuritéàl'Opérateur。
principe de fonctionnement
unvérinpneumatiquealimentéàiar-comprimé,couplé-unsystèmede transmissions - doublecâble,确保l'équilibragede la charderappliquée。
LeVérinAmplifie l'Action deMontée等人的descente Quiestiquée手册parl'Opérateursur l'ew of of of depréhensiono e e e e e e e sur la Charge。LeVérinEstalimentépar deux Circutspréréglés:le premierÉquilibreen permance en presence l'e of of of depréhension,第二équilibrelesdifférentspoids poids de la Charge。




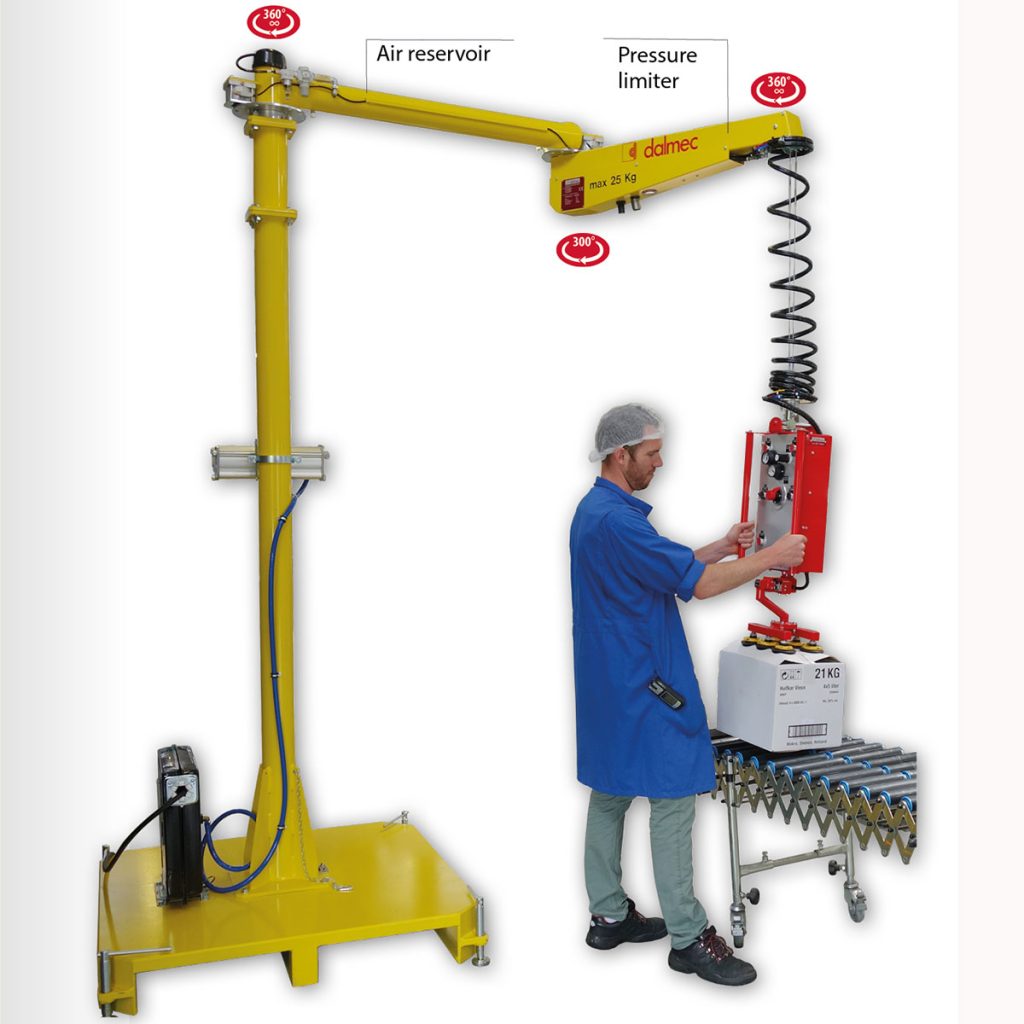
| 基本标准fixéeAusol | 基本自动稳定倒战车Élévateur | 基本自动稳定倒入转板 |
 |
 |
 |
| 基本自动稳定的操作 | 战车摩托车倒轨au sol | Chemin de RoulementEncastréDansle sol |
 |
 |
 |

Platine d’Ancrage
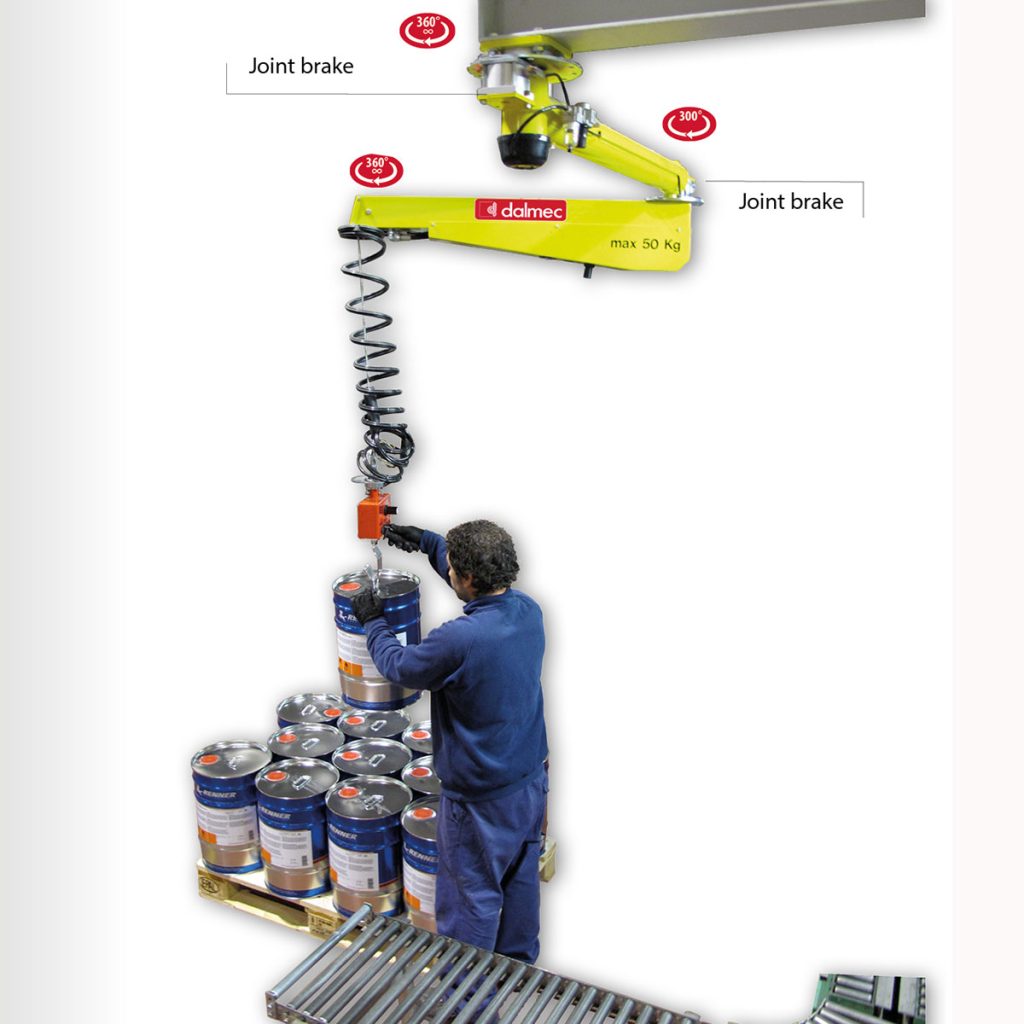
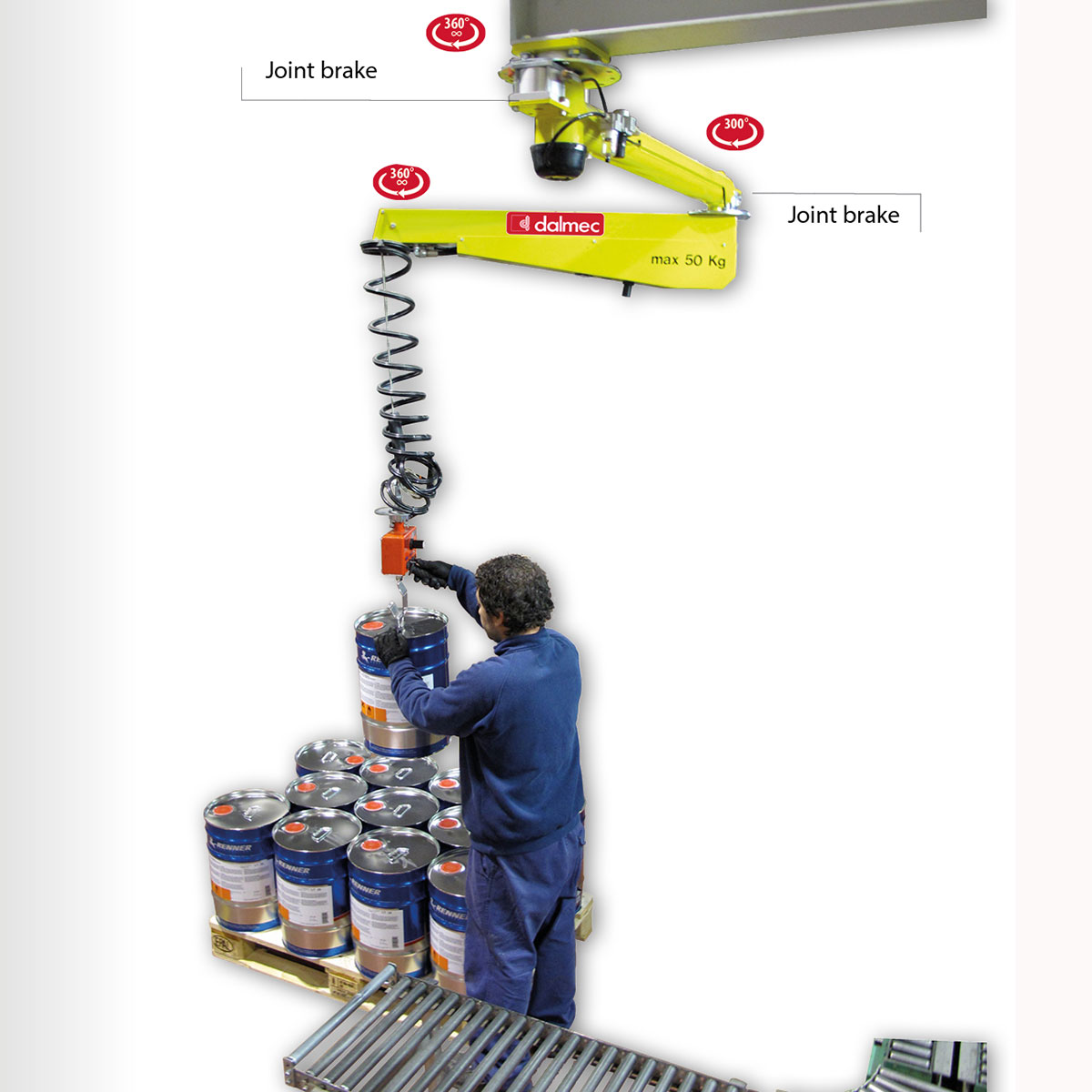
Le Manipulateur Pneumatique en版本“Aérienfixe” Permetd'évitertout encombrement au sol。
La Platine du manipulateurestFixée - la la structure u sur une Console。
tous les mouvements dans l'espace sont libre et sont obtenus avec un D'SOUM d'Arimim par l'Action directe del'Opérateursur l'eforil of of of of of depréhensiono s o s sur la coluch。

固定
Le ManipulateurestéquipédeChariotAdaptéAuRoulement dans le Rail。
Chemin de Roulement
Le Chemin de Roulement EstConstituéParDeux rails enprofilésu eN铝反对,Reliéspar entretoises de Renfort。les pattes d'Accrochage -la losustante et lesbutéesfin de Resultectcompropètentla forniture。
固定结构支持
La fienation du Chemin de Roulement - 结构de de support esréaliséparl'Intermédiairede tirants et pattes d'Accrochage。