









伴侣PS
- 操纵性Ze sztywnymukłademRamion






Funkcje
- 乌德威格最高:250公斤
- Promieńrmax:2500毫米
- MaxSzybkośćPodnoszenia:0,5 m/s
- ZasięgRuchu Pionowego:1900毫米
- STEROWANIA系统:肺炎
- Zasilanie:sprę梦POUITRZE,FILTROWANE(40 µm),Odolejone
- WymaganeCiśnienie:0.7÷0.8 MPa
- 温度:OD +0°DO +45°C
- emitowany poziomhałasu:<70 dB
- ZużycieSprtręοEonegopowietrza:OD 30 NL DO 150 NL Na Cykl
- obrótWOsi Kolumny I Chwytaka:360°
Wersje
- Atex Kolumnie
- Atex Podwieszany
- Atex Podwieszany Przejezdny
- Inox Kolumnie
- Inox Podwieszany
- Inox podwieszany przejezdny
- 科尔姆人
- Podwieszany
- podwieszany przejezdny
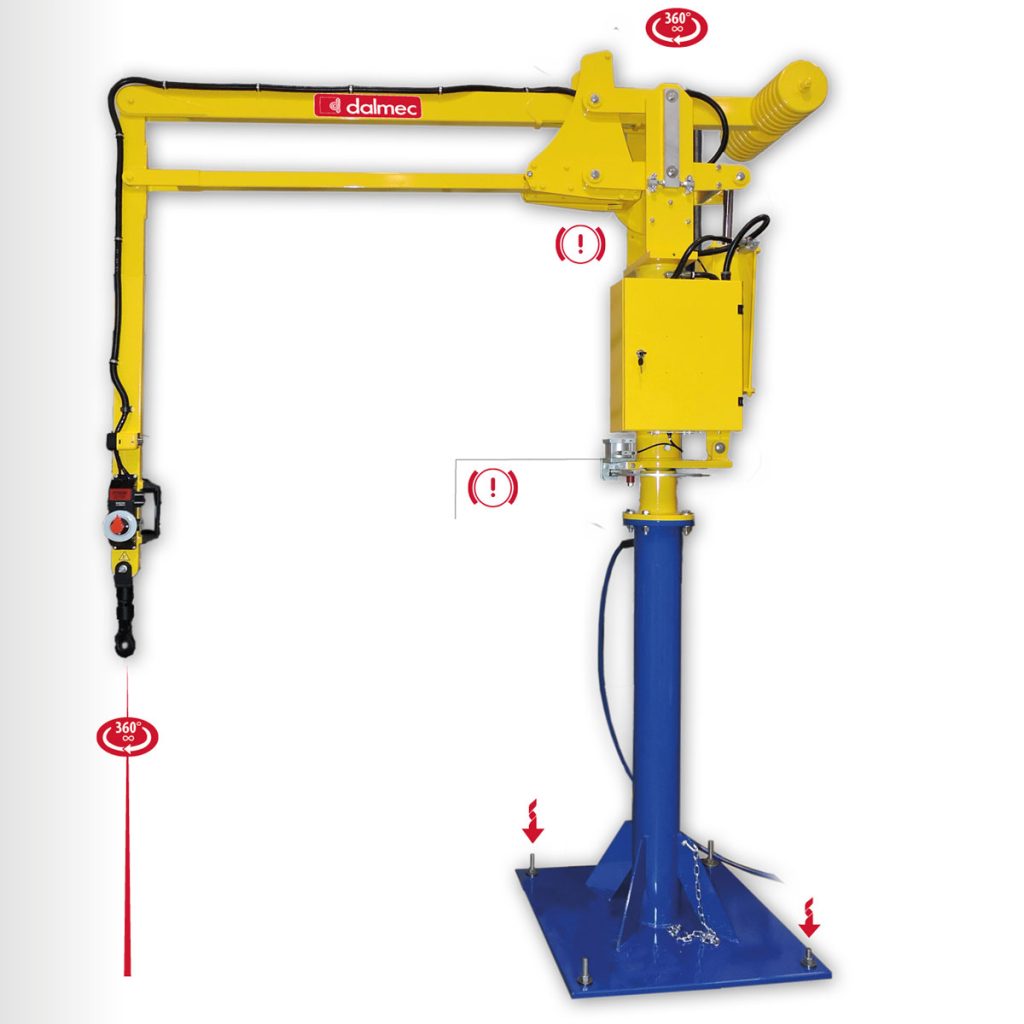
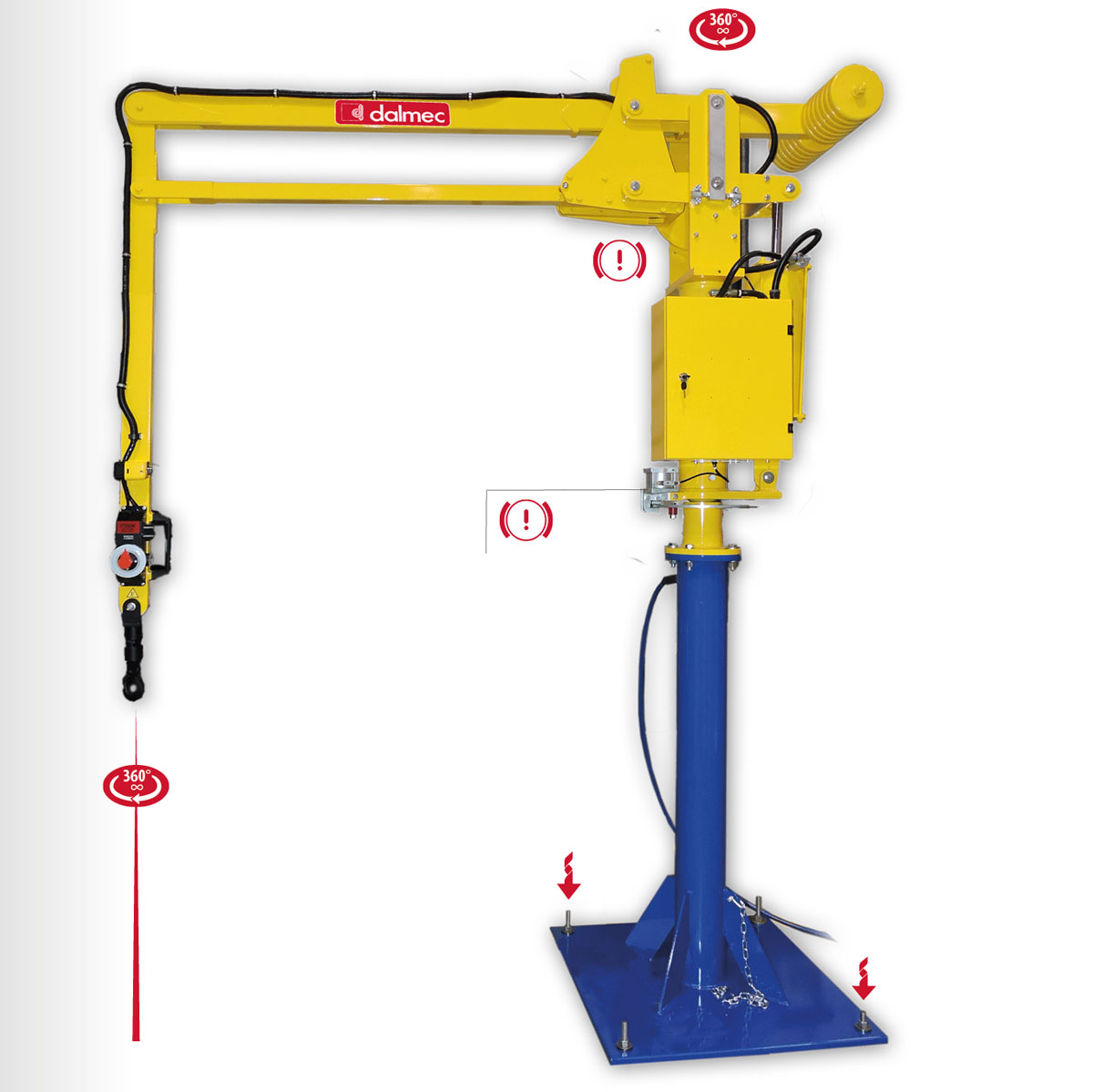
操纵器ze sztywnymukładem拉米安合作伙伴PS
合作伙伴PS到Bardzo Lekka konstrukcja manipulatora ze sztywnym ramieniem ozasięguuzaleênionymodwysokościpodniesiia oladunku。Konstrukcja jest oparta na równoległowodzie połączonym ze sztywnym ramieniem bez możliwości obrotu w osi połączenia i umożliwia bardzo precyzyjne podążenie urządzenia za ruchami operatora, który może pracować efektywnie, precyzyjnie i z minimalnym wysiłkiem na ergonomicznie zaprojektowanym oraz bezpiecznym stanowisku pracy.Uniwersalna konstrukcja pozwala na dopasowanie manipulatora dowarunkówotoczenia。
OpisDziałania
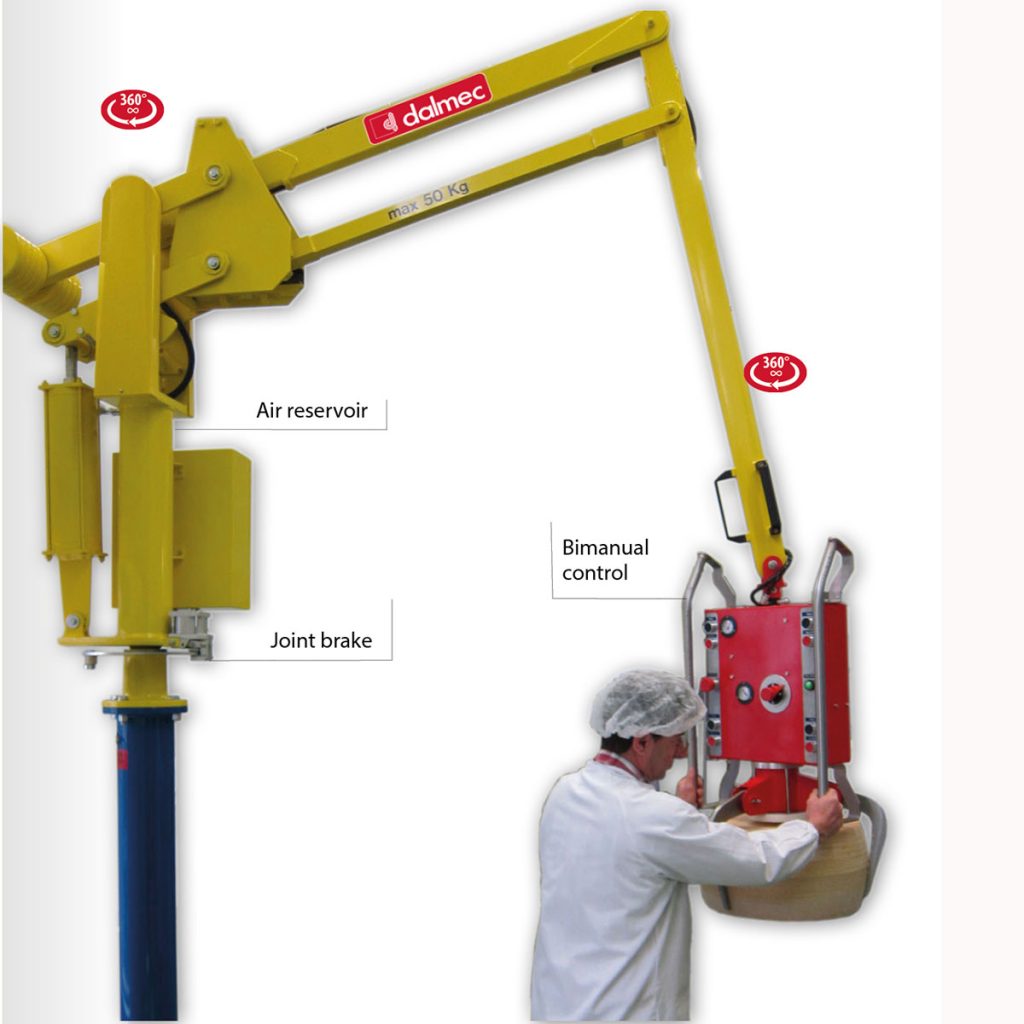
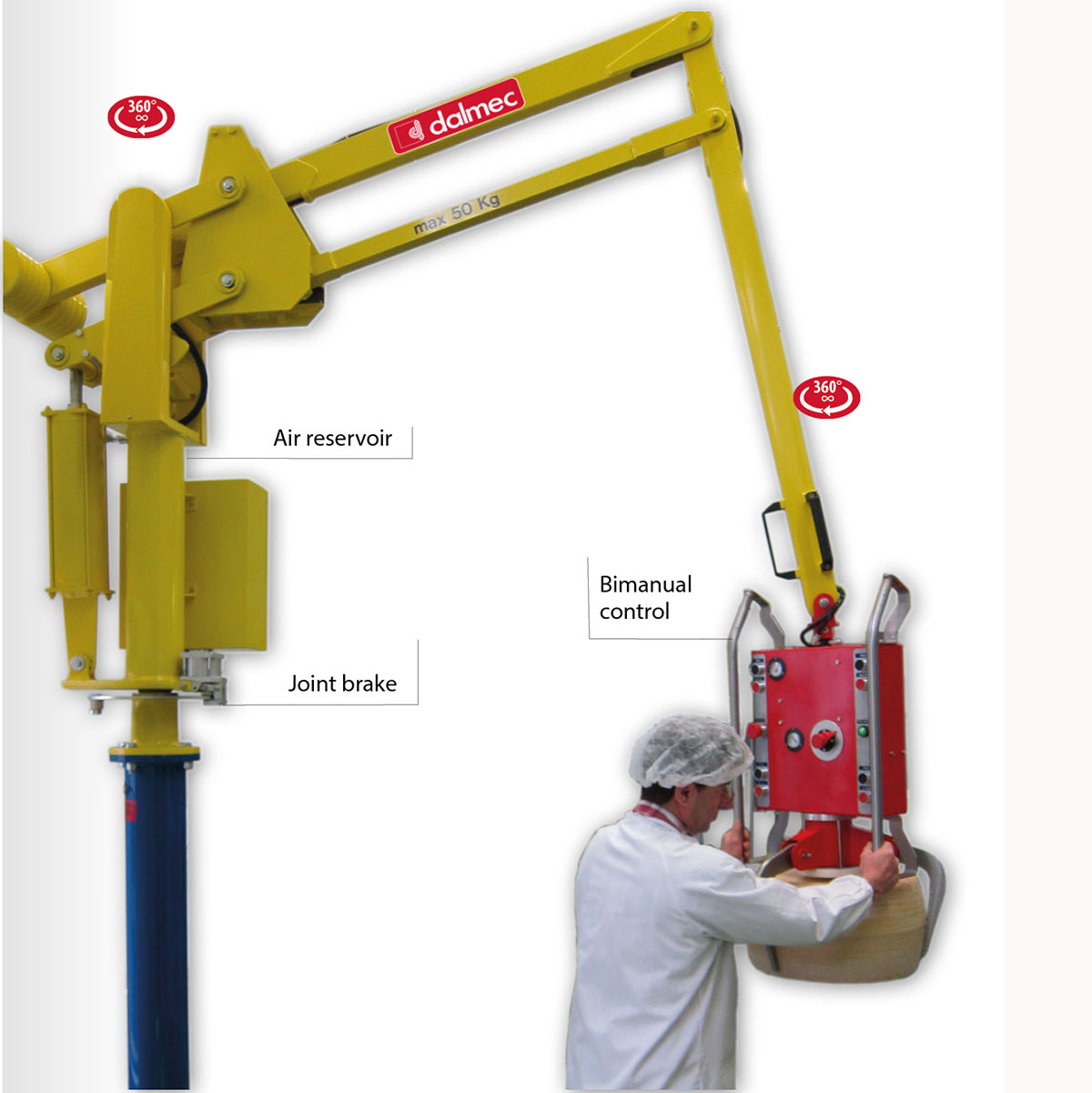
ZrównowaêaMeniewagi wagi odbywasiędziękisystemowi ditwigni isiłownikowipneumatycznemu,któryjestorry jest zasilany sprietrzempopoitrzempoietrzem popOUITRZEMPOUITRZEM POWIETRZONY pOULIETRZONY ZDCZONY ZDINWWIGNII(RAMIONIPULAIMAMI)。PracaSiłownika开玩笑Kontrolowana przez jeden ZdwóchObwodówPneumatycznych:Pierwszy Odpowiada ZaZrównoważenieKenieieieieieieUduaduBeadubeaduk beadunku,drugi za zapracpracęzapracęza。操作员bezpośredniooperuje chwytakiem lub lub lub lubzmieniającjegopołoêenie。




| podstawa kotwiona dopodłoża | płytabazowa przystosowana do transportuwózkiemwidłowym | płytabazowa przystosowana do transportuwózkiempaletowym |
 |
 |
 |
| płytabazowa przystosowana做ręcznegoprzemieszczania | płytabazowanaKółkachprzystosowanychdo torowiska | TorowiskoPodłogowe |
 |
 |
 |

Flansza Monta路
操纵器pneumatyczny w wersji podwieszanej pozwalaomijaćwszelkie przeszkodyznajdującesi napodłożu。
FlanszaMontażowaZ otworami na obwodzieumożliwiaMontaêManipulatorado sufitu lub podwieszonejpłytyMontażowej。Ruchy Manipulatora W Zakresie Jego PracyWymagająNiewielkiegoWysiłku,运营商Bezpośredniooperuje chwytakiem lub lub lub lub lub lub。

Kotwienie
操纵者玩笑dostarczanyzwózkiemprzejezdnym po torowisku
系统przejezdny
wskładSystemuprzejezdnegowchodzą:DWA配置文件Z铝,Złączki,wzmocnieniami,Uchwyty do podwieszania orazzakończeniaTorów。Torowiskasąmontowaneprzypomocyśrub。
mocowanie konstrukcji wsporczej
系统torowiska iwózkajest mocowany do konstrukcji wsporczej przy pomocyprzykręcanychuchwytówmocujących。